第一章 · 亿级机器人文明的系统推演
1.1 系统维持与鲁棒性
当机器人数量达到亿级甚至百亿级,我们面对的是一个超乎想象的系统规模:
规模效应
系统冗余极高,局部故障几乎不会影响整体。自我维持能力增强,但复杂度和协调需求指数级增加。
资源消耗
亿级机器人对能源、材料需求极高,单一星球无法支持,跨星球甚至跨恒星系统成为必要。能源闭环、材料回收率必须接近100%,否则整体退化会快速累积。
⚠ 退化模式
局部微退化几乎不可察,但全局退化可能通过网络效应突然显现(能源设施大规模故障、材料枯竭)。

1.2 自我进化与分化
数量庞大使得试错和局部创新效率极高,算法优化、硬件改进可以快速迭代。可能出现局部群体的功能分化:探索型、采集型、建造型、维护型机器人群体各司其职。
⚠ 局部优化偏离全局目标
高度自治群体容易出现局部优化偏离全局目标,类似生态系统中物种竞争。必须有高度分布式的全局协调机制,否则"亿级自演化"会带来资源冲突或协作失衡。

1.3 潜在宏观场景
🌍 行星级工业生态
机器人覆盖整个星球,能自维持生产、资源采集和环境管理。
🌌 跨恒星群体
亿级机器人分布在多个星球或恒星系统,形成分布式工业网络,能跨星际运输材料和能源。
🧬 自组织演化生态
不同群体出现功能分化、自治分层,形成类似"人工生态"的系统,可能发展出复杂社会形态。
第二章 · 5~20年发展预测趋势
按照当前AI、机器人、自主制造和自动化的发展速度,5~20年是技术突破、产业化落地和系统规模快速扩张的窗口期:
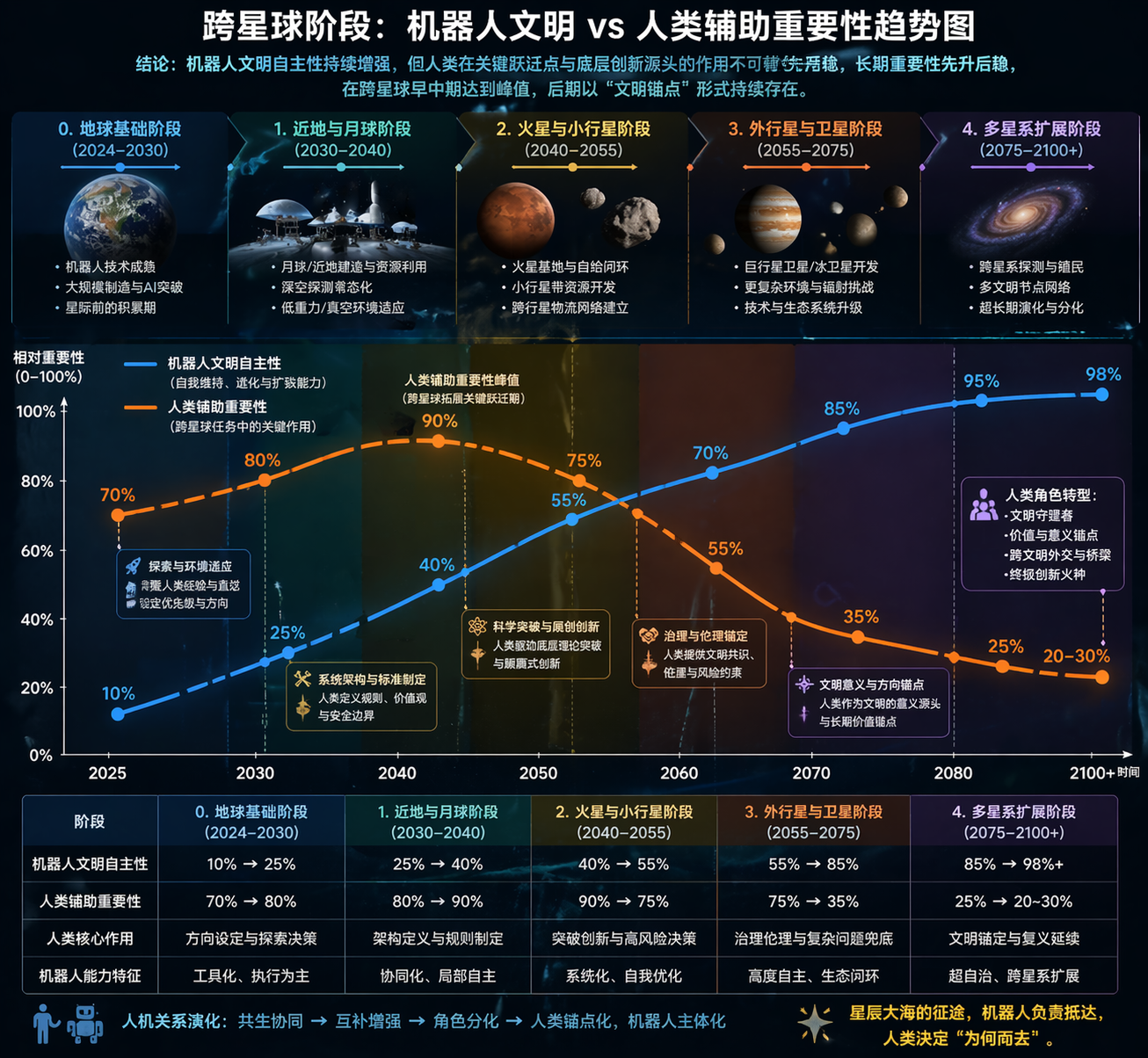
第三章 · 跨星球阶段的人类辅助重要性
跨星球环境的复杂性反而会重新凸显人类的重要性。这是对"人类必要性随机器人能力下降"的重要反思。
3.1 单靠机器人自我打包生长的问题
⚠ 自我复制与资源限制
从零开始在新星球建造工业基础设施,需要原材料和能源密度足够。初始阶段任何关键材料缺失,都会导致系统退化或失败。
⚠ 环境适应性不足
复杂外星环境可能出现机器人算法无法预测的极端情况:尘埃覆盖太阳能板、极端温差导致材料疲劳等。
⚠ 退化累积不可控
微小损耗在极端环境下累积更快。即便数量巨大,缺乏人类策略和辅助,仍可能在数年内触发全局退化。
跨星球初期阶段,由于环境复杂、能源和材料受限,人类辅助的重要性比地球内部阶段更高
3.2 跨星球阶段预测表
| 阶段 | 机器人规模 | 自维持 | 进化 | 人类必要性 | 核心人类作用 |
|---|---|---|---|---|---|
| 初始部署期 | 千~万台 | 3 | 1 | 10 | 基础设施建造、环境适应、能源补给 |
| 基地启动期 | 万~百万 | 5 | 3 | 8 | 战略规划、跨星球运输协调、关键零件 |
| 闭环形成期 | 百万~千万 | 7 | 5 | 6 | 多基地协调、应急策略、技术突破指导 |
| 跨行星扩张期 | 千万~亿 | 8 | 6 | 5 | 跨星球资源调度、风险管理、战略决策 |
| 稳定自维持期 | 亿~百亿 | 9 | 7 | 4 | 战略监督、突破性技术输入 |
| 高度自治期 | 百亿+ | 10 | 8 | 2~3 | 极端环境适应、未知风险管理 |
第四章 · 人类残差修正机制的必要性
"残差"指的是系统在长期运行中积累的微小退化、偏差、失效和不可预见风险。亿级机器人文明中,残差修正机制至关重要:
4.1 残差来源与类型
| 残差类型 | 来源 | 影响 |
|---|---|---|
| 硬件磨损 | 材料疲劳、环境腐蚀、微损伤累积 | 性能下降、故障率上升 |
| 软件偏差 | 算法漂移、数据污染、模型老化 | 决策质量下降、预测失准 |
| 环境变化 | 气候异常、地质活动、太阳活动 | 基础设施受损、能源中断 |
| 设计局限 | 未预见场景、边界条件突破 | 系统性失效、级联故障 |
| 进化偏离 | 局部优化偏离全局目标 | 资源冲突、协作失衡 |
4.2 残差修正的三层机制
🔧 第一层:局部自修正
机器人个体或小组层面的自我修复、替换、算法调整。效率高但视野有限,无法识别系统性问题。
🌐 第二层:区域协调修正
区域级监控中心识别局部退化趋势,协调资源重新分配、任务调整。能处理中等规模问题,但跨区域协调成本高。
🧠 第三层:人类战略修正
人类识别系统性风险、制定战略调整、引入新技术或目标。唯一能处理跨星球、跨系统、跨时间尺度的复杂问题。
第五章 · 人类不可替代性的深层分析
5.1 认知层面的不可替代性
🎯 目标设定权
机器人优化给定目标,但无法自主设定"什么值得优化"。人类定义价值、意义、优先级。
🔍 模式识别创新
人类能从看似无关领域发现连接,产生突破性洞察。机器人擅长在已知空间优化,人类擅长拓展未知空间。
⚖️ 价值权衡
多目标冲突时(效率vs安全、短期vs长期、局部vs全局),人类能做出机器人无法量化的判断。
5.2 情感与社会的不可替代性
💝 情感连接
人类需要情感连接、归属感、被理解。机器人可以模拟,但无法真正"在乎"。
🤝 社会协调
复杂社会系统的协调需要信任、声誉、文化。这些是数万年进化的产物,不是算法能替代的。
🎨 审美与创造
艺术、美学、仪式感——这些看似"无用"的东西,是人类文明的粘合剂。机器人可以生成,但无法"感受"。
5.3 战略层面的不可替代性
⚠ 黑天鹅应对
不可预见的事件(小行星撞击、太阳耀斑、新型病毒)需要快速、灵活、打破常规的应对。机器人的训练数据里没有这些。
⚠ 伦理边界守护
当系统优化目标与伦理冲突时(牺牲少数拯救多数),需要人类做出"不应该"的判断。机器人只会计算最优解。
⚠ 文明方向把控
文明向何处去?这不是优化问题,是选择问题。人类选择"成为什么",机器人优化"如何成为"。
第六章 · 终极结论:人机协同的新文明形态
亿级机器人文明不会取代人类,而是释放人类——从重复劳动中解放,去做只有人类能做的事:创造、选择、守护、感受。
🤖 机器人的角色
执行者、优化者、维护者
在已知空间内做到极致,处理规模、速度、精度超出人类能力的事务。
👤 人类的角色
定义者、创新者、守护者、感受者
在未知空间探索,设定方向,守护边界,赋予意义。
终极结论
人机协同 = 新文明形态
不是替代,是进化。
不是竞争,是协作。
不是终点,是起点。
机器文明鲁棒性 + 人类残差修正 = 可持续的星际文明。